3 Caractéristiques métrologiques
- Rappels : revoir le diapporama du BUT 1 - R2.08
A REVOIR : Lien diapositives de cours du BUT 1 (R2.08)
- Voir le Vocabulaire international de la métrologie
- sur le site de l’ISO
3.1 Sensiblité
rappel BUT 1
[sensitivity, responsivity]
La Sensibilité est le rapport entre la variation de la sortie et la variation du mesurande.
Dans le cas des capteurs linéaires, la sensibilité est considérée constante dans la limite de variation du mesurande définie par l’Etendue de Mesure (E.M.)
C’est l’opération d’Etalonnage qui permet d’obtenir la sensibilté ( S constante si linéaire ou courbe S(m) si non linéaire)
3.2 Etendue de Mesure - Intervalle de mesure
Intervalle de mesure : Ensemble des valeurs de grandeurs d’une même nature qu’un instrument de mesure ou un système de mesure donné peut mesurer avec une incertitude instrumentale spécifiée, dans des conditions déterminées (Intervalle de valeurs du mesurande [min,max] dans lequel le capteur peut être utilisé dans les conditions définies par le fabricant.)
En général, c’est la limite de linéarité qui définit l’intervalle de mesure
Etendue de mesure, ou Etendue nominale: Valeur absolue de la différence entre les valeurs extrêmes d’un intervalle nominal des indications *Exemple : Pour un intervalle nominal des indications de -10 V à +10 V, l’étendue de mesure est 20 V.
Remarques :
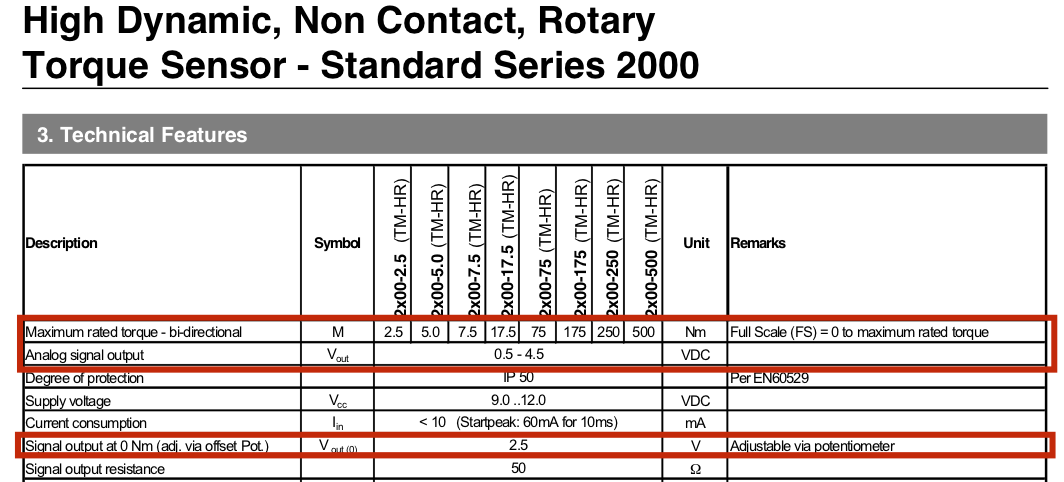
l’Etendue de Mesure est souvent abrégée (E.M.) sur les fiches techniques [en anglais Full Scale (F.S.)]
Les incertitudes de mesures sont souvent exprimées en fonction de l’Etendue de Mesure
Il y a souvent confusion entre l’Etendue de Mesure et l’intervalle de mesure
3.3 Linéarité
En général, les fabricants cherchent à obtenir des capteurs linéaires, c’est-à-dire que la valeur de sortie est proportionnelle à la valeur du mesurande, sensibilité est alors constante (indépendante de la valeur du mesurande)
La linéarité d’un capteur est souvent une approximation, valable dans un intervalle de mesurande définissant l’intervalle de mesure et l’Etendue de Mesure.
Dans cet intervalle, la courbe sortie = F( mesurande ) est assimilée à son apprroximation linéaire \Longrightarrow on exploite la sortie du capteur avec l’hypothèse que la réponse est de la forme sortie = Sensibilite \times mesurande + offset avec une Sensibilité et une ordonnée à l’origine (offset) constantes.
L’erreur de non linéarité caractérise l’écart maximum entre la courbe sortie = F( mesurande ) et son approximation linéaire.
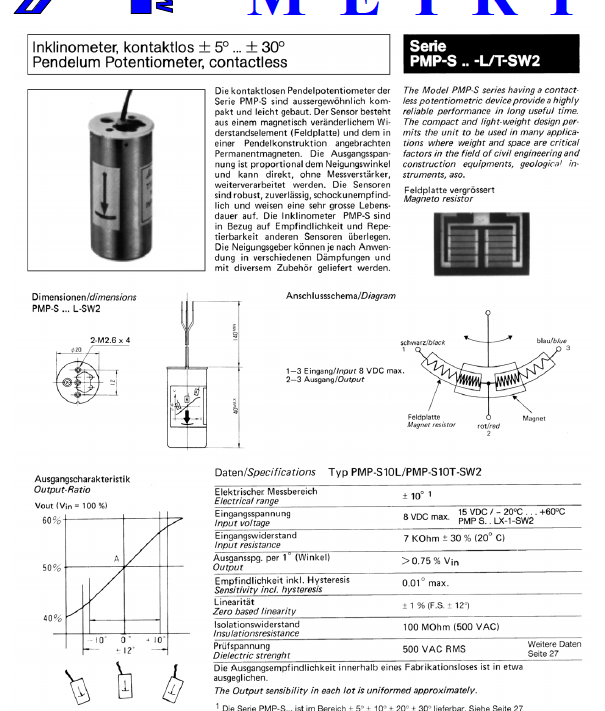
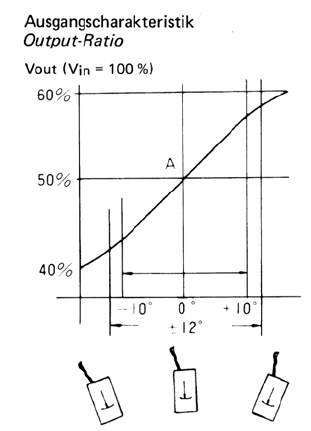
Exemple d’un capteur rotatif
basé sur une résistance variable
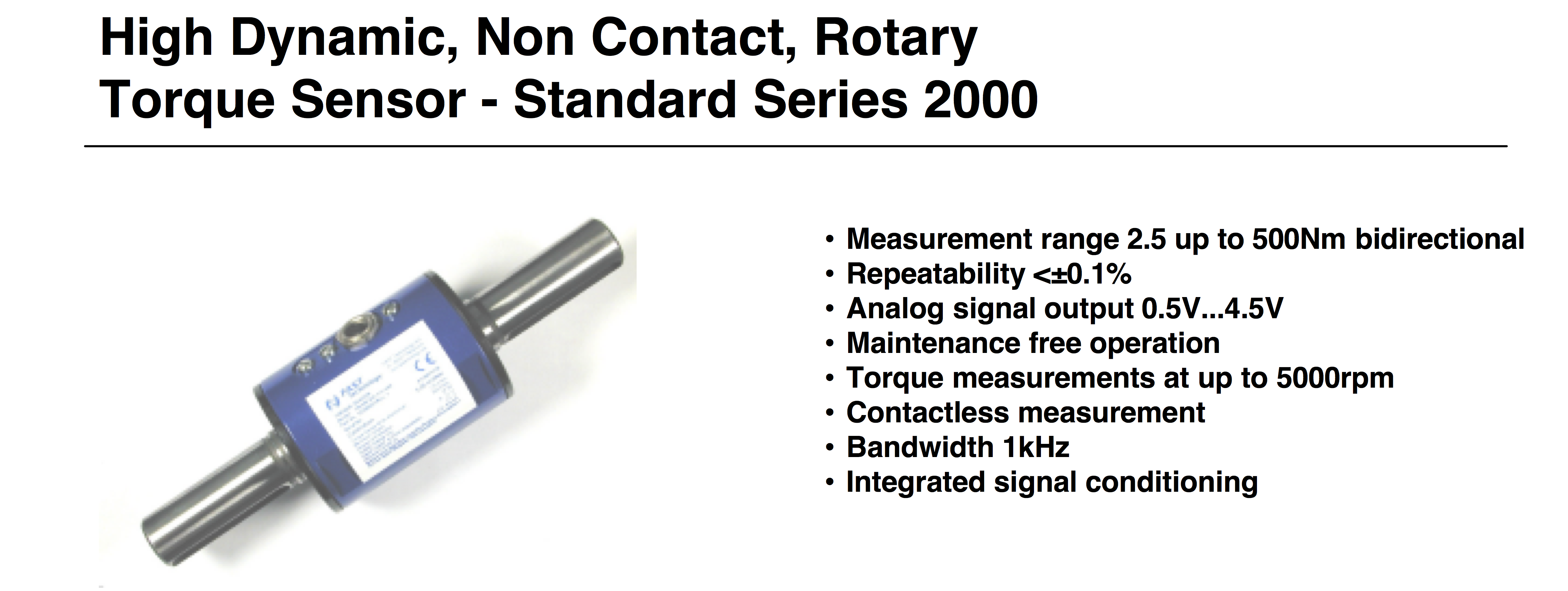
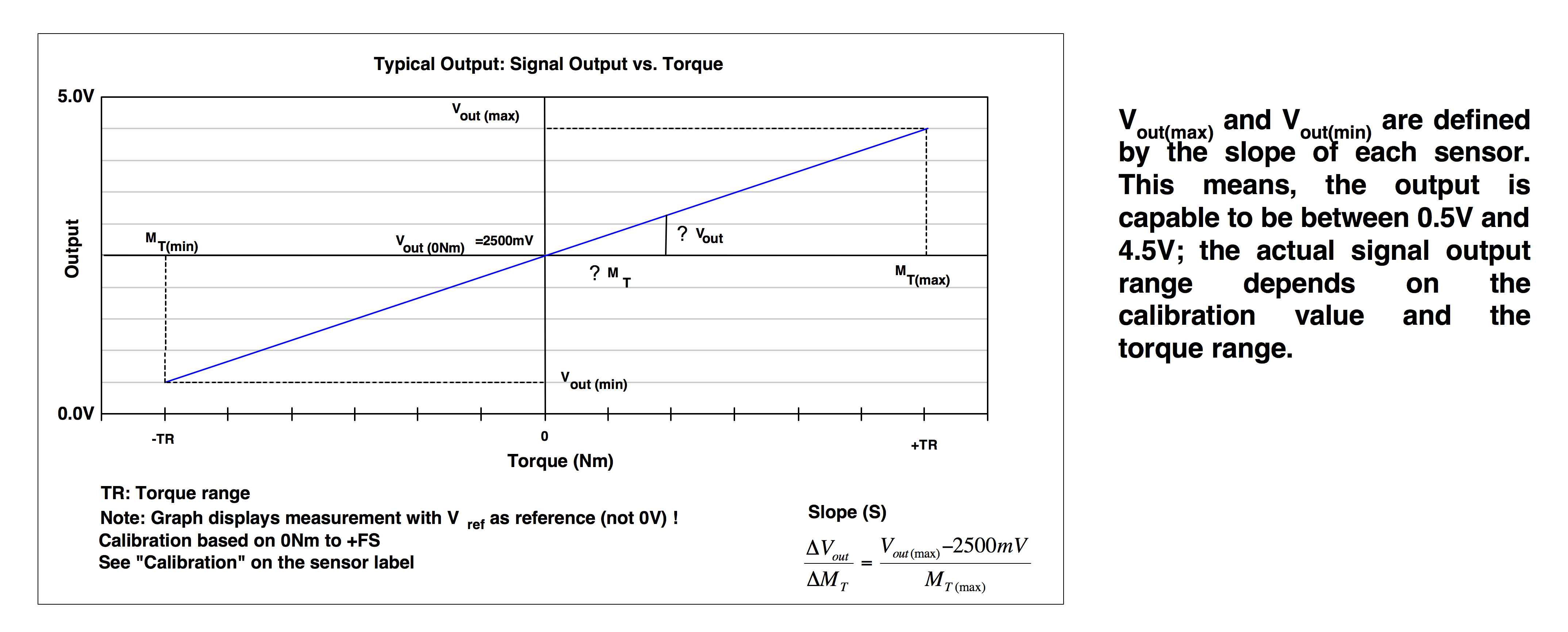
Exemple d’un capteur de couple
3.4 Résolution
La Résolution est la plus petite variation du mesurande qui entraine une variation de la sortie du capteur.
Pour des variations du mesurande inférieures à la résolution, on ne peut notamment pas distinguer les variations du mesurande des erreurs accidentelles (aléatoires).
La résolution détermine généralement le Rapport Signal sur Bruit (RSB) (RSB sur wikipedia){width=“100%”}
3.5 Précision
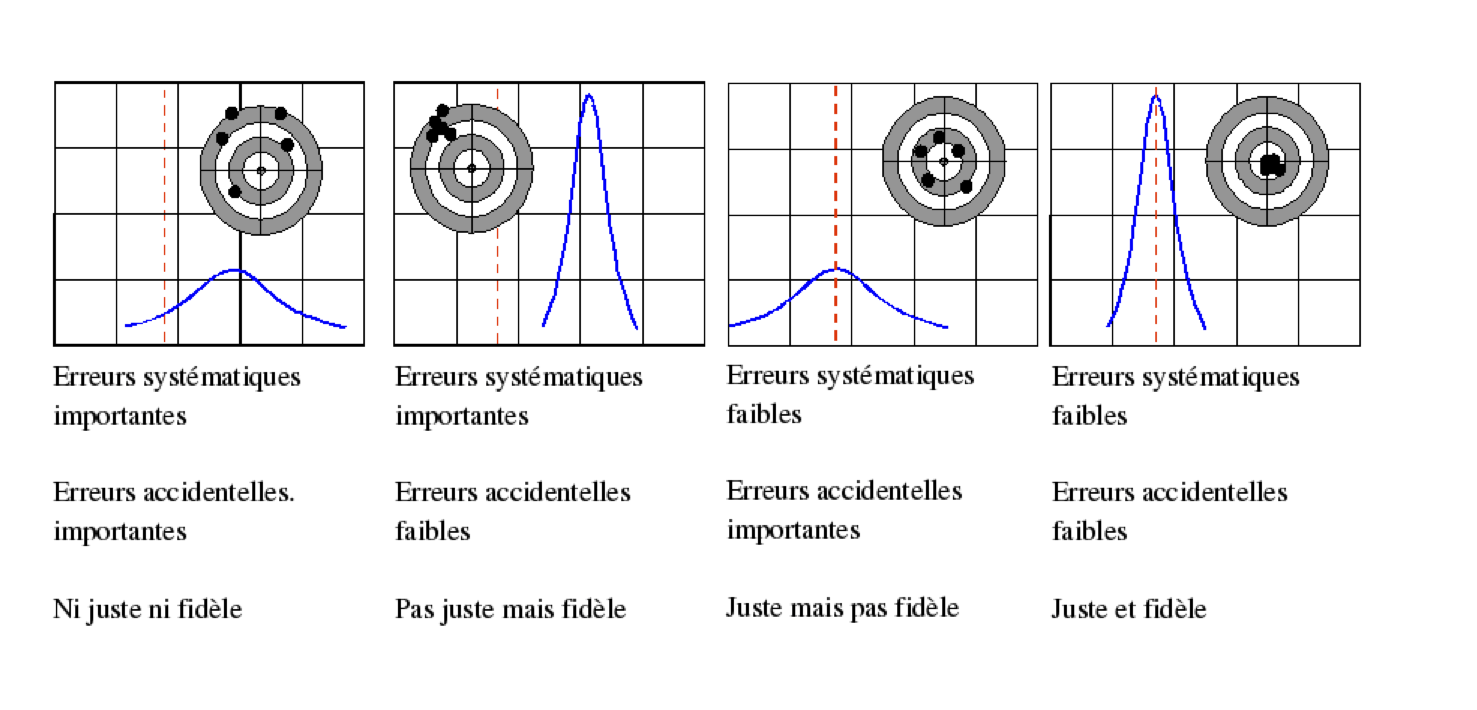
La précision caractérise l’aptitude du capteur à délivrer un signal permettant de remonter à une valeur du mesurande proche de la valeur vraie.
La précision est d’autant meilleure que les erreurs systématiques sont faibles [\longrightarrow justesse] ainsi que les erreurs accidentelles (aléatoires) [\longrightarrow fidélité]
3.6 Bande passante - Rapidité - Temps de montée …
Ces différents paramètres caractérisent la capacité du capteur ou de tout appareil de mesure à répondre à des variations du mesurande
La rapidité d’un capteur caractéristérise le temps de réponse d’un ccapteur. C’est le temps de réaction d’un capteur entre la variation de la grandeur physique qu’il mesure et l’instant où l’information prise en compte par la partie commande.
On peut la lier à plusieurs paramètres :
Principalement le temps de montée, qui peut être défini de plusieurs manières, la plus courante étant l’intervalle de temps correspondant à la croissance du signal de sortie de 10 % à 90 % de sa variation totale (t_{10\%-90\%}).
Des caratéristiques supplémentaires permettent d’affiner la rapidité du capteur : le temps de délai à la montée, le temps de descente, le temps de délai à la descente.
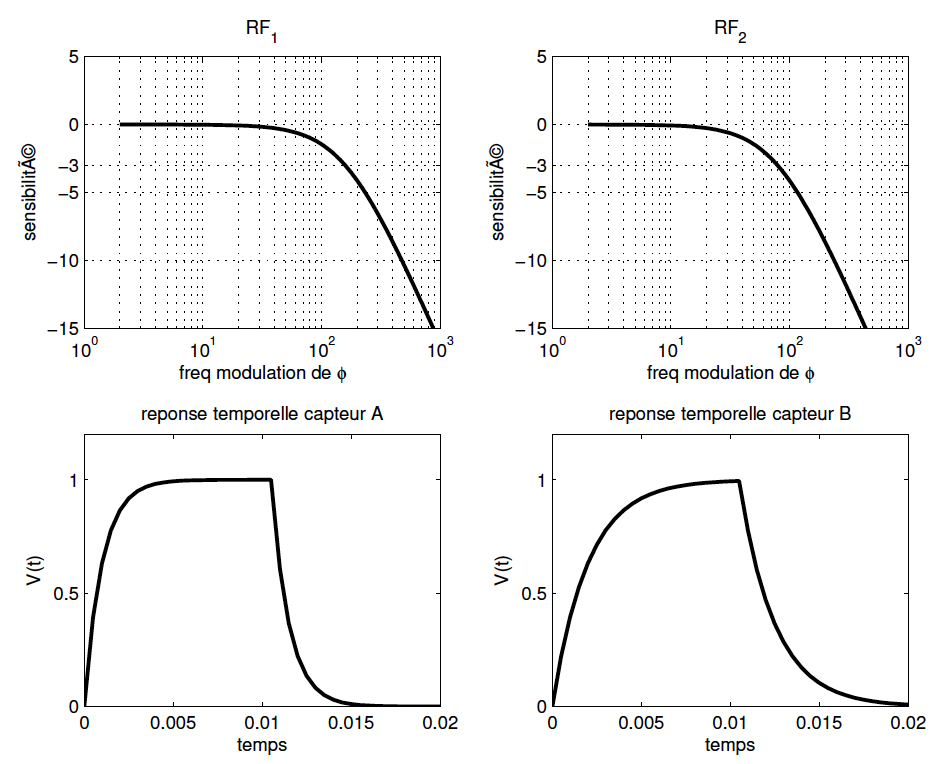
La Bande passante, qui est un intervalle qui définit dans le domaine fréquentiel [F_{min},F_{max}] la capacité du capteur à mesurer des phénomènes à variation lente voire constants (basses fréquences), ou rapiddes (hautes fréquences).
Remarques :
Le temps de montée et la bande passante sont deux manières de décrire l’aptitude d’un capteur à répondre raidement.
un capteur aura un temps de montée d’autant plus faible que la limite haute de la bande passante est élevée.
Souvent, seule la limite haute fréquence de la bande passante est donnée,
parfois c’est la fréquence de résonance qui est donnée. Pour un système résonant à une fréquence F_{res}, on considère en général que la bande passante est limitée en haute fréquence à F_{res}/3.
Les fiches techniques n’indiquent en général que les informations sur les temps de réponse ou que les informations sur la réponse en fréquence, et rarement les 2 à la fois.
![Diagrammes montrant le temps de réponse d’un système. En bleu la consigne (par exemple la variation du mesurande). En rouge la réponse du système. Temps de réponse: temps de décalage à la montée, temps de montée, temps de décalage à la chute, temps de chute [source : wikipedia]](./images/Temps_de_reponse.PNG)
3.7 Etc …
- Revoir cours BUT 1
- Vocabulaire Internationale de la Métrologie - sur le site de l’ISO
A compléter