SAE 2.5 - Mesurer - Partie Méthodes expérimentales
BUT GIM - Semestre 2
2023
1 Organisation de la SAE 2.5
Mesures Physiques
Voir consignes de Roman Peczalski, en lien avec la mécanique des fluides
3 TP : Mesures en mécanique des fluides (2 TP) et thermométrie (1 TP), en mai et juin
Méthodes expérimentales :
en lien avec la ressource Chaînes de mesure
1h CM 22/02
2h TD en salle informatique avec F. Colin (27-28/02)
4h Projet en autonomie le 9 mars de 13h30 à 17h30. Il portera sur le traitement des données (c.f. TD Excel sur la régression), la conversion d’unités, et des exercices d’application. Le travail sera individuel. et sera à rendre impérativement le 15 mars au plus tard.
2h TD le 13 oou le 14/03
coefficients : pas encore définis.
2 A propos des rapports d’expériences
Dans de nombreuses circonstances vous allez être amenés à :
réaliser des relevés de mesures
traiter et mettre en forme des données expérimentales
analyser les données pour évaluer des grandeurs qui ne sont par mesurées directemement mais déduites à partir d’autres mesurandes
2.1 Eléments que l’on doit impérativement retrouver dans un rapport d’expérience
Quelque soit la destination finale d’une étude expérimentale (contrôle, diagnostique, analyse statistique, rapport de TP, rapport de stage, projet, … ), il est nécessaire de trouver dans tout rapport les points suivants, généralement dans cet ordre :
Objectifs
Matériel et méthode
Données relevées
Analyse et description des résultats
Discussion
Conclusion
Objectifs
Doit présenter l’objectif recherché, les grandeurs que l’on cherche à évaluer, les éléments de de contexte, le système ou le dispositif étudié, les hypothèses, …
Matériel et méthode utilisés :
Liste des appareils, schéma du cablage, conditions de mesure, méthode mise oeuvre avec tous les détails, les éventuelles relations exploitées, les détails du traitement des données
Données relevées
Données brutes et mises en forme (tableaux, courbes) des relevés avant éventuel traitement
Analyse et description des résultats
éventuellement après mise en forme et traitement des données: il faut détailler ce que l’on doit voir, comprendre, observer, retenir, pourquoi on observe certaines variations, comparaison des résultats à des modèles, analyse statistique, incertitudes, …, etc.
Discussion des résultats
ce qu’il faut retenir, validité des résultats, analyse en lien avec les objectifs définis au départ
Conclusion
ce qu’il faut retenir en lien avec les objectifs, résultats finaux, validité des résultats, éventuellement conclusions pratiques pour l’exploitation des résultats ou l’amélioration de la méthode
La conclusion peut être complétée de perspectives selon la destination du rapport d’expériences
Important : *La conclusion doit “répondre” aux questions ou aux objectifs présentés au début du rapport \Longrightarrow quelqu’un qui ne souhaite pas lire tous les détails doit idéalement pouvoir lire à suivre la partie objectifs (ou l’introduction) puis directement “sauter” au paragraphe de conclusion.
Remarques :
Dans certains cas, les parties Analyse et Discussion sont combinées.
Dans un contexte de travaux pratiques, les objectifs et la partie matériel et méthode sont généralement précisés au début du sujet. Si vous faites une étude en dehors de ce contexte (notamment en projet, stage, etc), c’est à vous de bien préciser ces points en détails, et impérativement avant la présentation et la discussion des résultats.
Les resultats doivent impérativement mentionner les unités
Les valeurs numériques des estimations finales des mesurandes doivent autant que possible préciser l’intervalle de confiance afin de rendre compte des incertitudes de mesures. Dans un bon rapport, il est précisé, si besoin en annexe, les incertitudes et la méthode de calcul de l’intervalle de confiance.
Les incertitudes de mesures dépendent du matériel (voir le cours sur les capteurs et chaînes de mesure) et de la mise en oeuvre de la méthode, qui est à détailler. Leur évalution permet d’alimenter la discussion et de juger de l’exactitude des résultats.
Selon les objectifs définis, la méhode et les appareils de mesure utilisés doivent parfois correspondre à des exigences fixées par des normes.
La description du matériel, de la méthode de mesure (principes, hypothèses), et les détails de leur mise en oeuvre doivent être suffisamment complets et détaillés dans la partie matériel et méthode pour permettre à quelqu’un d’autre de reproduire l’expérience. On détaillera donc dans la partie Matériel et méthode :
La liste du matériel avec les références de tous les appareils de mesure et des capteurs (modèles, marques, voir numéros de série pour les rapports internes au service), les sensibilités et gains, les cablages, etc.
La mise en oeuvre du matériel (cablages, réglages, gains, alimentations, filtres, positions et montage des capteurs, etc.)
Le nombre de relevés, les informations sur la durée d’acquisition, la fréquence d’échantillonnage et les paramètres de quantification (acquisition numérique), les éventuels traitements (amplification ou atténuation, filtrages, moyennes, statistiques, …)
Les conditions environnementales (humidité, température, éventuellement la position de mesure, etc.)
IMPORTANT :
Cette description détaillée du matériel, de la méthode et de leur mise en oeuvre est souvent négligée ou incomplète, mais clairement: s’il manque ces informations, il n’est pas possible de reproduire vos observations, d’interpréter les résultats, de les vérifier, ni d’en évaluer le degré d’exactitude !
3 Analyse statistique des données
Lorsque vous analysez des données expérimentales qui comportent des erreurs accidentelles liées à la méthode ou aux phénomènes observés il peut être nécessaire de réaliser une analyse statistiques des données, et notamment de calculer les paramètres suivants :
moyenne
écart type
skewness
kurtosis
Il arrive souvent que des données dispersées peuvent être assimilées à des variables aléatoires obéissant à une distribution Gaussienne, symétrique autour d’une valeur moyenne, et dont la largeur est caractérisée par l’écart type.
En fonction des distributions statistiques observées, la distribution Gaussienne ne décrit pas correctement les données, et on peut être amené à chercher quelles autres lois de probabilité peuvent mieux modéliser la distribution des valeurs.
On met alors en oeuvre des méthodes d’analyses pour déterminer quelles types de modèles statistiques décrivent le mieux l’ensemble des données.
Cet aspect n’est pas traité en détail ici \longrightarrowVoir le cours de maths sur les statistiques à venir au semestre 2
4 Comparaison à des modèles
En général, on a une idée préalable des relations entre les grandeurs observées.
Très souvent, on ne mesure pas directement la grandeur que l’on souhaite évaluer, mais détermine des paramètres de manière indirecte : sur la base d’expériences, d’hypothèses, et de modèles reliant la grandeur recherchée à des grandeurs mesurables , on aboutit à une estimation de la grandeur à évaluer.
4.1 Cas d’une loi linéaire
Le modèle linéaire est très fréquemment utilisé pour modéliser des comportements physiques
Par exemple la loi de Hooke entre la contrainte et la déformation ou encore entre la température et la position du liquide dans le tube d’un thermomètre.
Dans le cours sur les capteurs, pour déterminer la sensibilité on a aussi exploité l’hypothèse d’une relation linéaire entre la sortie du capteur et le mesurande
Si on considère une situation où la relation entre des grandeurs x et y est supposée linéaire, alors on peut vouloir déterminer les paramètres a et b qui décrivent une fonction affine, c’est-à-dire, une relation du type
\boxed{y=a x + b}
On considère une situation où des données (x_i,y_i) sont issues de relevés de mesure.
Lors de la prise de mesure, il peut y avoir des incertitudes de mesure liées :
aux erreurs dites accidentelles (de nature aléatoires) induites par les instruments de mesure, les sources de bruit, ou la méthode utilisée et sa mise en oeuvre
(erreur de non linéarité, d’hysteresis, erreur de lecture, erreur de quantification, …)
à la nature instationnaire des phénomènes observées (turbulence, vibrations, …), ou à l’environnement (champs électromagnétiques par exemple)
En conséquence des erreurs aléatoires, les données mesurées ne s’alignent généralement pas exactement de manière rectiligne mais constituent un ensemble dispersé.
Les données mesurées sont représentées graphiquement à l’aide d’un nuage de points(x_i,y_i).
Une fois les mesures obtenues on cherche à retrouver un modèle linéaire parmi les points de mesures.
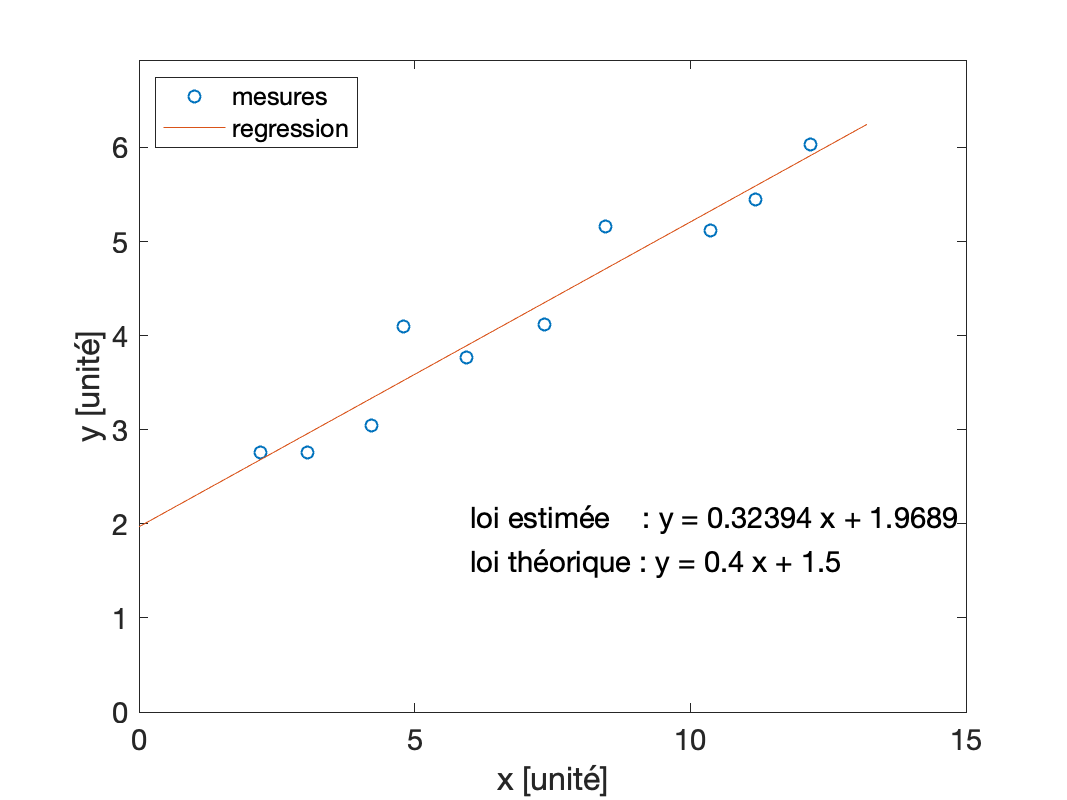
La régression linéaire est une technique qui consiste à construire l’équation d’une droite y = a x + b qui correspond “au mieux” aux données.
On cherche à trouver les valeurs de a (la pente) et de b (l’ordonnée à l’origine)
Le problème se ramène à la question suivante :
Quelle est la droite qui s’ajuste le mieux aux données, c’est-à-dire la droite qui est la plus proche des points, et selon quel critère et comment obtenir les valeurs de a et de b ?
Le critère des moindres carrés : Parmi toutes les droites possibles, on cherche la droite pour laquelle la somme des carrés des écarts verticaux des points à la droite est minimale.
En TD, cela a été fait “à l’oeil” en essayant de tracer la droite qui représente le mieux le nuage.
Le tableurs (Excel, libre office, numbers, google sheet, …) proposent généralement des fonctions permettant d’afficher des courbes de tendance et d’afficher sur le graphique. On choisira donc ici l’option qui pperme de rehcher la meilleure droite qui décrit le nuage de points.
De la même manière rechercher la relation linéaire en utilisant des fonctions ou méthodes écrites dans des languages de programmation comme python, C, matlab, R, fortran, octave, …
Exemple de régression linéaire à parttir d’un nuage de points (x_i,y_i)
4.2 Loi exponentielle y= A \rm{e}^{r x}
Le modèle linéaire n’est pas toujours pertinent pour modéliser certains comportements physiques.
Un modèle exponentiel est parfois plus représentatif des données mesurées.
Une loi exponentielle peut se mettre sous la forme générale :
\boxed{y= A \rm{e}^{r x}}
où r est une grandeur de dimension inverse à celle de x, de valeur positive ou négative, et A est une grandeur réelle.
C’est par exemple ce type de relation qui caractérise la diminution de l’amplitude des oscillations d’un système oscillant avec amortissement visqueux (voir TP de S4). Dans ce cas, r est négatif.
Certains logiciels (dont Excel) permettent d’estimer les valeurs de A et r.
Une autre solution est de modifier la relation afin de retrouver une relation linéaire.
Comment Linéariser le modèle ?
On peut retrouver une loi linéaire en calculant le logarithme népérien de l’expression y= A \rm{e}^{r x} :
\ln(y) = \ln (A \rm{e}^{r x}) \Longrightarrow \boxed{\ln (y) = \ln (A) + r x}
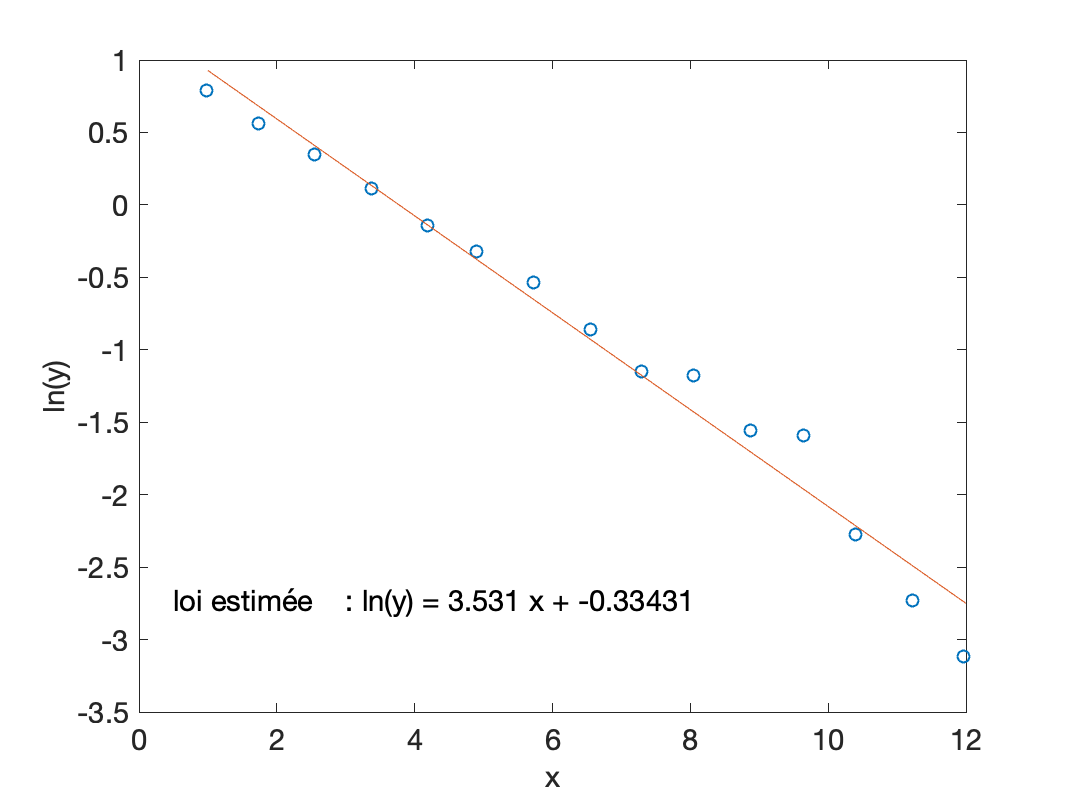
On constate que si on trace \ln (y) en fonction de x, on obtient une relation linéaire, et on peut estimer les valeurs de A et de r :
r est le coefficient directeur
\ln(A) est l’ordonnée à l’origine
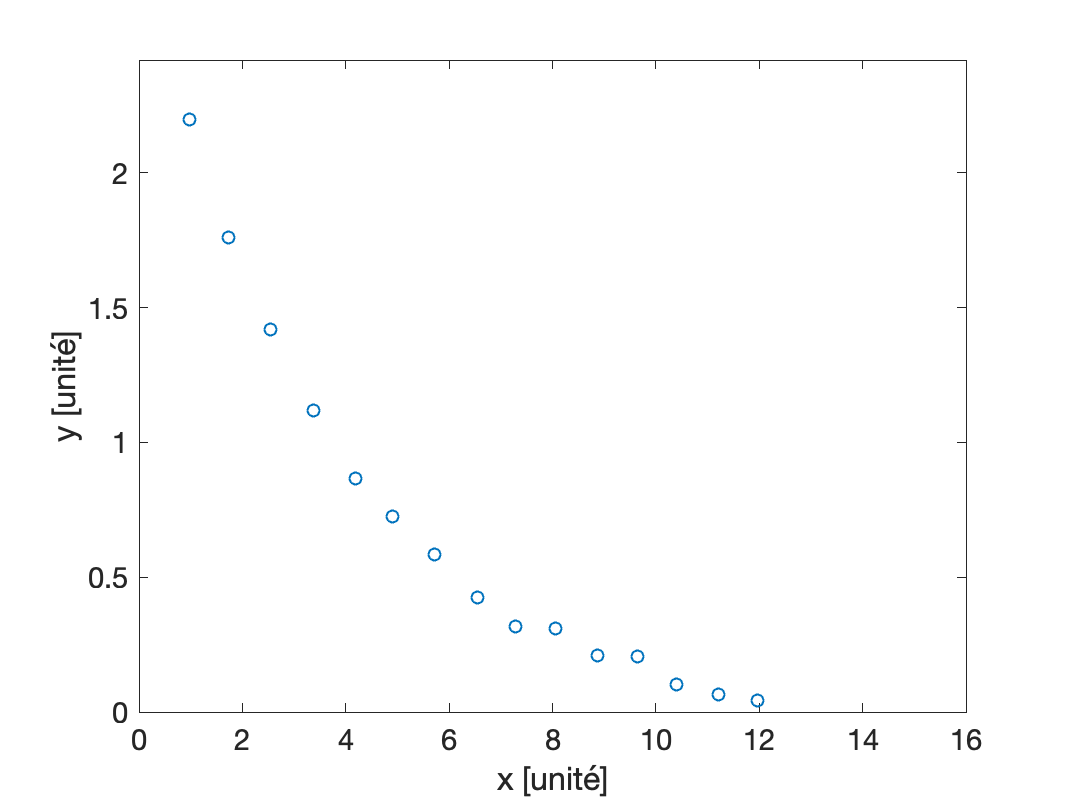
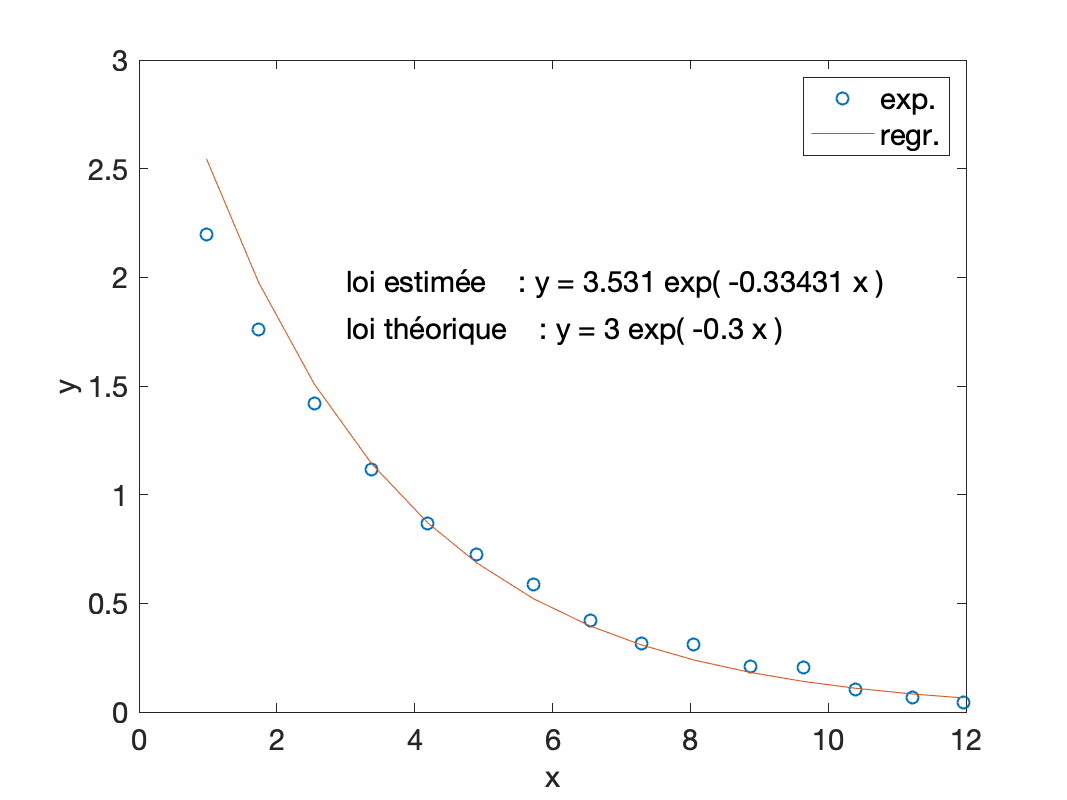
Données mesurées (x_i,y_i)on trace (x_i,\ln(y_i)) et on déduit \ln(A) et r par régression linéaire comme précédemmenton trace (x_i,y_i) et y= A \rm{e}^{r x}
Remarque : on voit sur la figure précédente que dans le cas d’une exponentielle décrossante il vaut mieux ne pas se baser sur les valeurs de faible amplitude. L’estimation des paramètres de la loi sont mieux déterminés si on n’effectue la régression que sur les valeurs les plus élevées.
4.3 Loi de puissance y = A x^n
Certains comportements physiques peuvent être modélisés par une loi puissance du type : \boxed{y = A x^n} où A et n sont des réels
Cas particuliers :
si n=1 on retrouve une loi affine comme vu précédemment, mais avec b=0\longrightarrow \ y = a x
si n=-1 on obtient une loi du type y=A/x
si n=1/2 on obtient une loi du type y=A \sqrt{x}
si n=2 on obtient une loi du type y=A x^2
etc …
Comment déterminer A et n ?
Si on considère le cas où deux grandeur x et y sont supposées suivre une relation du type y = A x^n, alors on analyse plutôt les relations entre \log (x) et \log (y).
Si on calcule le logarithme de la relation y = A x^n, on peut en déduire une relation linéaire entre \log (x) et \log (y) :
y = A x^n \Longrightarrow \boxed{\log (y) = \log (A)+ n \log (x)}
La courbe représentative dans le plan (\log (x),\log (y)) est une droite de pente n et d’ordonnée à l’origine \log (A)
Le plus souvent, on utilise le logarithme décimal (parfois noté \log_{10} ou \rm{LOG}) pour cette analyse, mais ce n’est pas impératif.
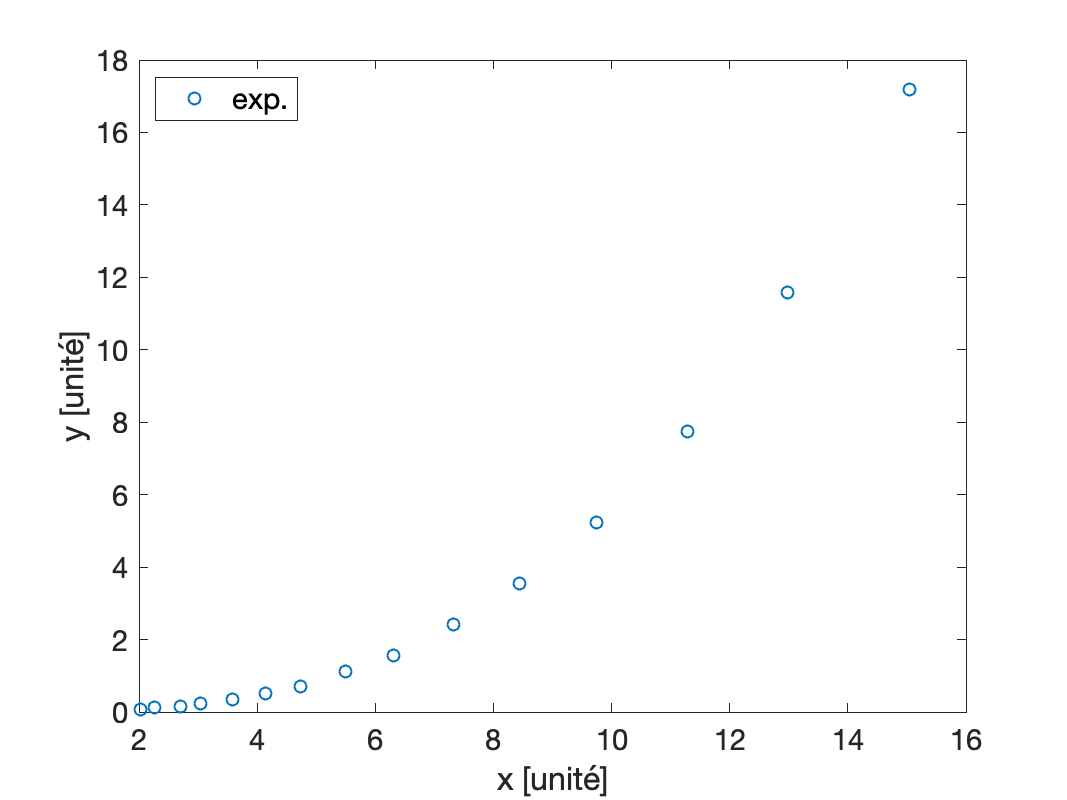
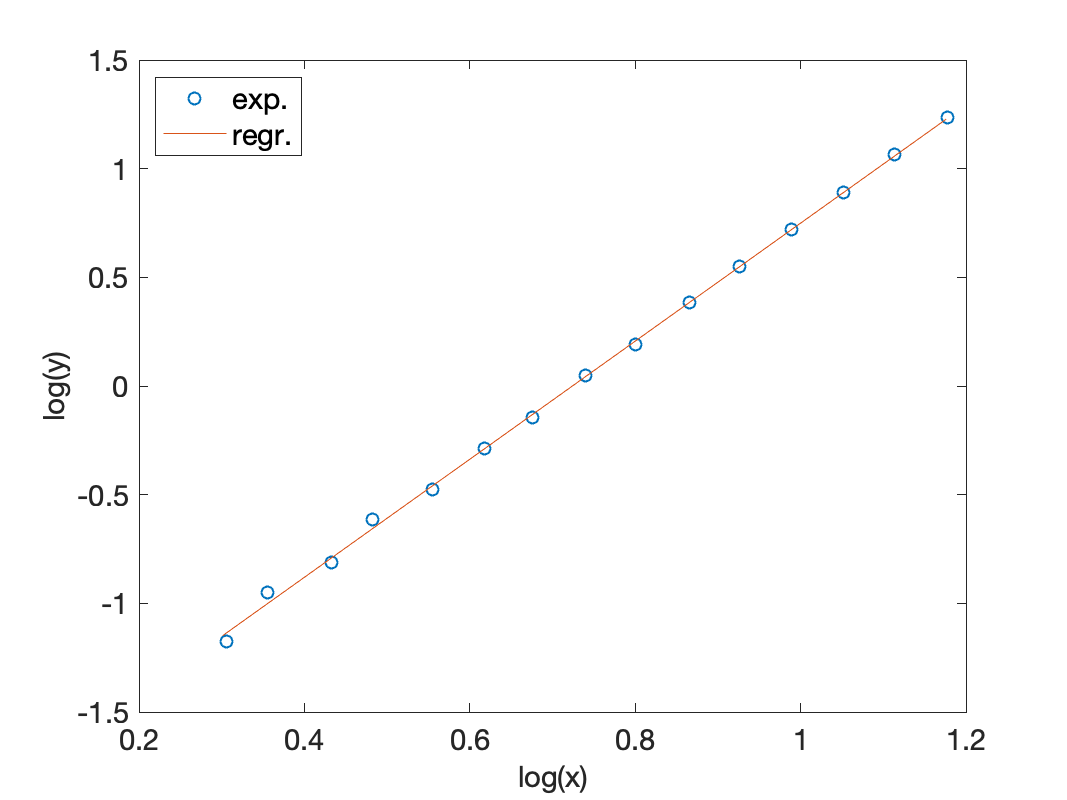
Graphiquement, pour faire apparaître les relations de type “lois de puissance” sous la forme de “droites”, on trace les données (x_i,y_i) sur un ordinateur ou sur du papier avec une représentation dite log-log, c’est-à-dire en échelle logarithmique en abscisse et en ordonnée.
En pratique, la distribution des valeurs de x_i que l’on fait varier dans les expériences est choisie en prévision de cette analyse en échelle logarithmique: on relève des valeurs de y_i pour des valeurs de plus en plus “espacées” de x_i, des plus petites aux plus grandes valeurs \Longrightarrowon fait varier x_i de manière exponentielle et pas linéaire !
Conséquence pratique: Si en représentant un nuage de points (x_i,y_i) en échelle logarithmique log-log et que l’on fait apparaître une relation linéaire entre \log (x_i) et \log (y_i), alors on en déduit que x et y sont liés par une loi du type y = A x^n.
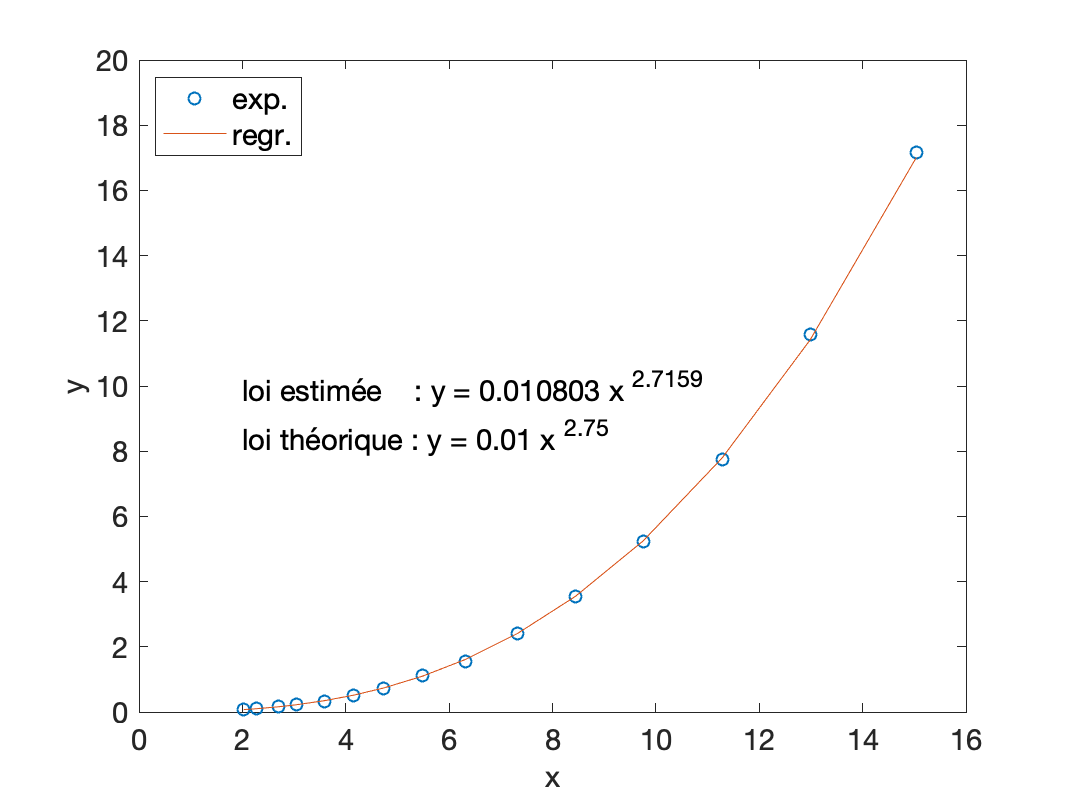
on trace (x_i,y_i)on trace (\log(x_i),\log(y_i)) et on détermine \log (A) et n par régression linéaire comme précédemmentTracé des données mesurées (exp.) (x_i,y_i), et loi estimée par régression (regr.) d’après la figure précédente. NB: la loi théorique n’est en pratique pas connue.
4.4 Pour en savoir plus …
Pour d’autres types de lois liant des grandeurs, ou pour minimiser les erreurs, on peut exploiter d’autres méthodes de régression.
Conséquence de la définition : les angles sont sans dimension
NB: Savoir que les angles en radian sont des grandeurs sans dimension est important lorsque l’on vérifie des formules par l’analyse des dimensions. Par exemple, une vitesse de rotation \Omega s’exprime en rad/s et a pour dimension l’inverse d’un temps : [\Omega] = T^{-1}
En pratique on utilise d’autres unités pour les angles :
degrés, minutes : \pi radians \longleftrightarrow 180 \rm{^\circ}lien wikipedia
grades : 1 grade \longleftrightarrow\pi / 200 radians lien wikipedia
Dans les formules on exprimera quasi systématiquement les angles en radians, et losque ça n’est pas le cas, il faut impérativement le préciser.
5.4 Unités non S.I.
Sans précision sur les unités, notamment dans des formules, on considère que les valeurs sont exprimées en unité S.I. Il convient néanmoins de les préciser lorsque l’on présente des valeurs numériques.
Il existe d’autres unités historiques ou usuellesnon S.I. qui sont fréquemment utilisées, notamment lorsquelles conduisent à des ordres de grandeur plus “pratiques” selon ce qui est observé.
Dans les formules reliant différentes grandeurs, il faut quasi-systématiquement exprimer les valeurs numériques en unités S.I. . Lorsque ce n’est pas le cas, il faut impérativement préciser les unités à utiliser.
5.4.1 Longueur (unités non S.I.)
Unité officielle : le mètre (m)
Unités non S.I. :
Le pouce (eng: inch) :
1 pouce = 25,4 mm
symbole : in ou ’’ ou po
Exemples : couramment utilisé pour des dimensions mécaniques (ex: un diamètre de 1/4’’), les tailles de vêtement, la résolution d’image (dpi = dot per inch = point par pouce), etc.
Le pied (eng: foot)
égal à 12 pouces : 1 pied = 1 in \times 12 = 25,4 mm \times 12 = 30,48 cm
l’hectopascal (hPa), utilisé en météorologie : 1 hPa = 100 Pa
le mégapascal (MPa) et le gigapascal (GPa), utilisé en science des matériaux : 1 MPa = 10^6 Pa, 1 GPa = 10^9 Pa
Unités non S.I. :
atmosphère (atm) : 1 atm = 101 325 Pa
bar (bar) : 1 bar = 10^5 Pa (sous multiple courant : 1 mbar = 100 Pa)
millimètre de mercure : 1 mmHg = 133,322 Pa
pouce de mercure (inHg ou “Hg) : 1 inHg = 3 386,389 Pa.
centimètre d’eau : 1 cmH2O = 98,063 8 Pa
la livre-force par pouce carré (psi) : 1 psi = 6 894,76 Pa
Schmerber : 1 Schmerber = 10 Pa
5.4.4 Température (unités non S.I.)
Unité officielle : le Kelvin (K)
Unités non officielles :
Le degré Celsius : 1 \rm{^\circ C} = 1 K - 273,15
Le Farenheit : calé sur l’échelle Celsius par la relation
\rm{T (^\circ F) = 95 T (^\circ C) + 32 T( ^\circ F)=\frac {9}{5} T(^\circ C)+32}
6 multiples et sous-multiples, préfixes
6.1 base décimale
Pour exprimer des valeurs numériques de différents ordres de grandeur, on utilise des préfixes qui correspondent à des coefficients multiplicateurs.
Attention : Pour faire un calcul, on revient toujours à l’unité S.I. (sauf si précisé), et il faut connaître les puissances de 10 qui correspondent aux préfixes les plus souvent utiliser.
Préfixes des multiples et sous-multiples (source: bipm )
Nom
Symbole
Facteur multiplicateur
quetta
Q
10^{30}
ronna
R
10^{27}
yotta
Y
10^{24}
zetta
Z
10^{21}
exa
E
10^{18}
péta
P
10^{15}
téra
T
10^{12}
giga
G
10^{9}
méga
M
10^{6}
kilo
k
10^3
hecto
h
10^2
déca
da
10^1
déci
d
10^{–1}
centi
c
10^{–2}
milli
m
10^{–3}
micro
\rm{\mu}
10^{–6}
nano
n
10^{–9}
pico
p
10^{–12}
femto
f
10^{–15}
atto
a
10^{–18}
zepto
z
10^{–21}
yocto
y
10^{–24}
ronto
r
10^{–27}
quecto
q
10^{–30}
6.2 Autres systèmes
Bien que le système décimal soit la référence, certaines unités sont liées à des systèmes à base 12 (système duodécimal), 16 (système hexadécimal) , ou 60 (système sexagésimal).
Si on veut exprimer la dimension de X indépendamment de l’unité, on écrit : [X]
[X] est ensuite en fonction des symboles des 7 grandeurs fondamentales :
Masse : M
Temps : T
Longueur : L
Température : \rm{\Theta}
Intensité électrique : I
Quantité de matière : N
L’intensité lumineuse : J
7.2 Exemples
7.3 dimension de la vitesse v
La vitesse est une distance (longueur L) parcourue par unité de temps (T) \Longrightarrow \ \ \boxed{ \ [v] = \rm{L.T^{-1}} \ }
7.4 dimension de l’énergie E.
On peut se baser sur l’expression de l’énergie cinétique E=\frac{1}{2}m.v^2 où m est la masse de l’objet en mouvement et v sa vitesse
La masse m est une grandeur fondamentale : [m] = \rm{M}
Il a été établi dans l’exemple 2: [v] = \rm{L.T^{-1}}, donc on déduit [v^2] = \rm{L^2.T^{-2}}
Donc finalement : [E] = \rm{M.L^2.T^{-2}}
7.5 Vérification de l’homogénéité de formules
7.5.1 Exemple 1 :
Après quelques lignes de calculs, on obtient à la formule suivante :
h = \frac{P t}{m g} où h est une hauteur, \mathcal{P} est une puissance, t est le temps, m est une masse, g=9.81 \ \rm{m.s^{-2}} est une accélération.
Question : Cette relation est-elle homogène ?
(comprendre : est-ce que les expressions à gauche et à droite de l’égalité ont-il la même dimension ?)
Méthode
On détermine les dimensions du premier membre
On détermine les dimensions du second membre
Si elles sont égales, alors la relation est homogène
Application dans le cas de la relation h = Pt / (mg)
Membre de gauche : h est une hauteur \Longrightarrow \ [h] = \rm{L}
Membre de droite :
\mathcal{P} est une puissance \Longrightarrow \ [\mathcal{P}] = \rm{M^.L^2T^{-3}}
t est le temps \Longrightarrow \ [t] = \rm{T}
m est une masse \Longrightarrow \ [m] = \rm{M}
g est une accélération \Longrightarrow \ [g] = \rm{L.T^{-2}}
On en déduit :
\left[ \frac{P t}{m g} \right] = \rm{(M^.L^2T^{-3}).T/(M.L.T^{-2})} = \rm{L}
On constate que la dimension des membres des deux côtés de l’égalité est identique \Longrightarrowla relation est homogène.
NB: si ça n’était pas le cas la relation ne pourrait pas être correcte, et ce serait l’indice d’une erreur dans les calculs, qui seraient à vérifier à nouveau.
7.5.2 Exemple 2
En cherchant l’altitude maximum z_{max} que peut atteindre un objet lancé depuis une hauteur H avec une vitesse initiale verticale v_0, on obtient après calcul la formule suivante :
z_{max} = H + \frac{v_0^2}{2 g}
où g = 9,81 \ \rm{m/s^2}
Question : Cette formule est-elle valable en terme de dimensions ?
7.5.3 Exemple 2
7.6 Grandeurs courantes
Tableau des dimensions de grandeurs courantes et méthodes mnémotechniques (formule pour retrouver l’expression en fonction des grandeurs fondamentale)
grandeur
unité
formule
Dimension
vitesse
\rm{m.s^{-1}}
v=\rm{d}x / \rm{d}t
\rm{L.T^{-1}}
accélération
\rm{m.s^{-2}}
\gamma = \rm{d}v / \rm{d}t
\rm{L.T^{-2}}
force
N
F = m \gamma
\rm{M.L.T^{-2}}
énergie, travail
J
\mathcal{W} : Force . déplacement
\rm{M.L^2.T^{-2}}
puissance
W
\mathcal{P} : énergie par unité de temps
\rm{M.L^2.T^{-3}}
contrainte, pression
Pa
Force par unité de surface
\rm{M.L^{-1}.T^{-2}}
tension
V
\mathcal{P}/I
\rm{M.L^2.T^{-3}.I^{-1}}
résistance électrique
\Omega
\rm{U/I}
\rm{M.L^2.T^{-3}.I^{-2}}
8 Incertitudes
En préambule : Voir le diaporama de Chaînes de Mesures
Revoir les notions d’erreurs systématiques (constantes ou lentement variables) et d’erreurs accidentelles (aléatoires)
8.1 Incertitude absolue et incertitude relative
On ne connait pas l’erreur que l’on fait lorsque l’on estime la valeur m d’un mesurande, donc on précise l’incertitude maximum \Delta m
L’écriture du résultat d’une mesure doit indiquer l’intervalle de confiance: \boxed{ m \pm \Delta m } (+ l’unité), avec :
m : la valeur du mesurande
\Delta m : l’incertitude absolue (\Delta m >0)
On définit l’incertitude relative à partir de m et \Delta m : \boxed{ \Delta m / m} (sans unité ou en %)
8.2 chiffres significatifs
Lorsque l’on présente un résultat numérique, les chiffres significatifs sont = tous les chiffres sauf les 0 placés à gauche du premier chiffre non nul
Exemples :
3,1416 : 5 chiffres
0,00012 : 2 chiffres
558,90 : 5 chiffres
8.3 Lien entre nombre de chiffres significatifs et l’incertitude
Le nombre de chiffre significatif à écrire dépend de l’incertitude absolue :
On conserve 1 chiffre arrondi à l’entier supérieur si le premier chiffre significatif de \Delta m est \geq 5.
On conserve 2 chiffres arrondis à l’entier supérieur si le premier chiffre significatif de \Delta m est <5.
Exemples :
si \Delta m = 558,90, on conserve \Delta m = 6.10^2
si \Delta m = 3,1416, on conserve \Delta m = 3,2
si \Delta m = 0,00012, on conserve \Delta m = 1,2.10^{-4}
8.3.1 Exemple 1
vitesse v mesurée : 125 km/h avec une incertitude relative de 5 %
Incertitude absolue : \Delta v = 125 \times 5/100 = 6,25 \rm{km/h}\Longrightarrow on conserve 7 km/h
on écrit donc :
avec l’incertitude absolue v = 125 \pm 7 \rm{km/h}
avec l’incertitude relative v = 125 km/h \pm 5\%
8.3.2 Exemple 2 :
masse m mesurée : 74,596 kg avec une incertitude relative de 3 %
Incertitude absolue : \Delta m = 74,596 \times 5/100 = 2,23788 \rm{kg}\Longrightarrow on conserve 2,3 kg
on écrit donc
avec l’incertitude absolue m = 74,6 \pm 2,3 \rm{kg}
avec l’incertitude relative m = 74,6 \pm 3 \%
8.4 Incertitudes liées à l’erreur de résolution ou l’erreur de lecture
8.4.1 Exemple 1: appareil de mesure à affichage numérique
Erreur de résolution: l’incertitude sur la mesure est égale au plus petit écart possible entre deux valeurs mesurées.
Sur l’exemple de la figure ci-dessous, l’incertitude est \Delta m = 1 \rm{g}
On écrit le résultat sous la forme \Delta m = 88 \pm 1 \rm{g}.
Masse mesurée par un appareil de mesure à affichage numérique: m = 88 \pm 1 \rm{g}
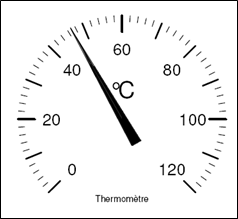
8.4.2 Exemple 2 : appareil de mesure avec affichage à aiguille
L’incertitude de lecture sur un appareil à aiguille est égale à la moitié de la plus petite graduation de l’appareil
Dans l’exemple ci-dessous, une graduation correspond à une variation de 2^\circ\rm{C}\Longrightarrow \ \Delta T = 1^\circ\rm{C}
On écrit T = 47 \pm 1^\circ\rm{C}
Température mesurée par un appareil de mesure à affichage à aiguille: T = 47 \pm 1^\circ\rm{C}
8.4.3 Exemple 3 : règle graduée
on mesure un objet avec une règle graduée en mm.
La mesure est entre les graduations 241 mm et 242 mm.
On peut donc estimer la valeur à 241,5 mm avec une incertitude absolue de 0,5 mm
On en déduit l’Incertitude relative : \Delta L / L = 0.5 / 241.5 = 0,2 \ \%
On notera avec l’incertitude absolue L= 241,5 \pm 0,5 \ \rm{mm}
On notera avec l’incertitude relative L= 241,5 \pm 0,2 \ \%
8.4.4 Attention
La mesure ne peut pas être plus précise que l’incertitude :
On n’écrit pas : m = 74,496 \pm 2,3 \ \rm{kg}
mais m = 74,5 \pm 2,3 \ \rm{kg} (on arrondit la valeur au plus près)
La mesure doit être au moins aussi précise que l’incertitude :
P = 182,0 \pm 4,6 \ \rm{kW}
ici on est précis à 0,1 kW près
8.5 Calcul d’incertitudes
Le calcul de la propagation des incertitude peut être plus ou moins complexe selon les relations entre les grandeurs.
On considère seulement deux cas simples ci-après
8.5.1 Exemple : Périmètre d’un triangle isocèle
Calcul du périmètre d’un triangle isocèle de côtés a et b : P = 2a + b
On mesure a et b et on estime les incertitudes \Delta a et \Delta b
On calcule d’abord P = 2a + b
Lorsque la formule reliant les grandeurs ne fait aparaitre que des sommes et/ou des dfférences, alors les incertitudes absolues s’ajoutent :
P = 2a + b \ \Longrightarrow \ \Delta P = 2 \Delta a + \Delta b
On obtient directement l’incertitude totale absolue
On en déduit l’incertitude relative P/\Delta P
8.5.2 Exemple : masse volumique d’un cylindre
La masse volumique \rho d’un cylindre est obtenue en divisant la masse par le volume selon la formule \rho = m / (\pi r^2 h), où r est le rayon et h la hauteur
On mesure r et h et on estime les incertitudes \Delta r et \Delta h
On calcule d’abord \rho = m / (\pi r^2 h)
Lorsque les grandeurs sont liées par de rapports ou des produits, alors ce sont les incertitudes relatives qui s’ajoutent (même si grandeur au dénominateur), et on compte n fois les incertitudes relatives si une grandeur est élevée à la puissance n :
\rho = m / (\pi r^2 h) \Longrightarrow \frac{\Delta \rho}{\rho} = \frac{\Delta m}{m} + 2 \frac{\Delta r}{r} + \frac{\Delta h}{h}
On en déduit l’incertitude absolue :
\Delta \rho = \rho . \frac{\Delta \rho}{\rho}
9 Exercices
9.1 conversion d’unités
Convertir :
500 tours par minute (rpm round per minute, ou tour/min) et radians par seconde (rad/s)
40 rad/s en tour/min
50^\circ en radians
67^\circ\rm{C} en kelvins
293 K en ^\circ\rm{C}
72 km/h en m/s
20 litres par heure (\ell/h) en \rm{m^3/s}
12 \rm{\ell/min} en \rm{m^3/s}
1 \rm{cm/min} en \rm{m/s}
120 \rm{dm^3} en \rm{m^3}
3 \rm{m^3} en \rm{\ell}
7 \rm{d\ell} en \rm{m^3/s}
1 \rm{mH_2O} en Pa
300 \rm{mbar} en kPa
7 Pa en \rm{N.m^{-2}} puis dans les unités du S.I.
2 bar en Pa
3 bar en atm
1,5 atm en Pa
5 hPa en bar
1 \rm{mHg} en hPa
200 \rm{mmHg} en Pa
2 \rm{MPa} en \rm{N.m^{-2}}
16 ; 26 ; et 28 pouce en mm
1/16 ; 1/8 ; 1/4 ; 1/2 pouce en mm
votre taille en pieds et pouces (feet, inch)
3 \rm{cm^2} en \rm{m^2}
9.2 Analyse des dimensions
9.2.1 Déterminer les dimensions des grandeurs suivantes en fonction des grandeurs fondamentales
Dimension de la pression P ?
Dimension de la puissance \mathcal{P} (\overrightarrow{force}.\overrightarrow{vitesse})
Dimension de la tension électrique U
Dimension de l’accélération ?
Dimension d’une force ? (masse \times accélération)
Dimension de la raideur k d’un ressort ? (force de rappel = -k \times variation de longueur)
Dimension d’un couple (idem moment d’une force) ?
9.2.2 analyse d’expressions
Quelle est la dimension de \sqrt{2 g h} où g=9,81 \ \rm{m/s} et h = 1 \ \rm{m} ?
Quelle est la dimension de \sqrt{g/\ell} où g=9,81 \ \rm{m/s} et \ell = 30 \ \rm{cm} ?
Quelle est la dimension de \sqrt{k/m} où k est la raideur d’un ressort et m une masse ?
Quelle est la dimension de \overrightarrow{\mathcal{M}}_{\vec{F}/A}.\overrightarrow{\Omega}_{s/\mathcal{R}} où \overrightarrow{\mathcal{M}}_{\vec{F}/A} est le moment d’une force et \overrightarrow{\Omega}_{s/\mathcal{R}} est une vitesse de rotation ?
 Le travail sera individuel. et sera à rendre impérativement le 15 mars au plus tard.
Le travail sera individuel. et sera à rendre impérativement le 15 mars au plus tard.